Nils T Siebel
Research Home Page
Principal areas of research:
Intelligent Autonomous Systems,
Image and Video Processing
News
Contents of this page
1 Brief CV
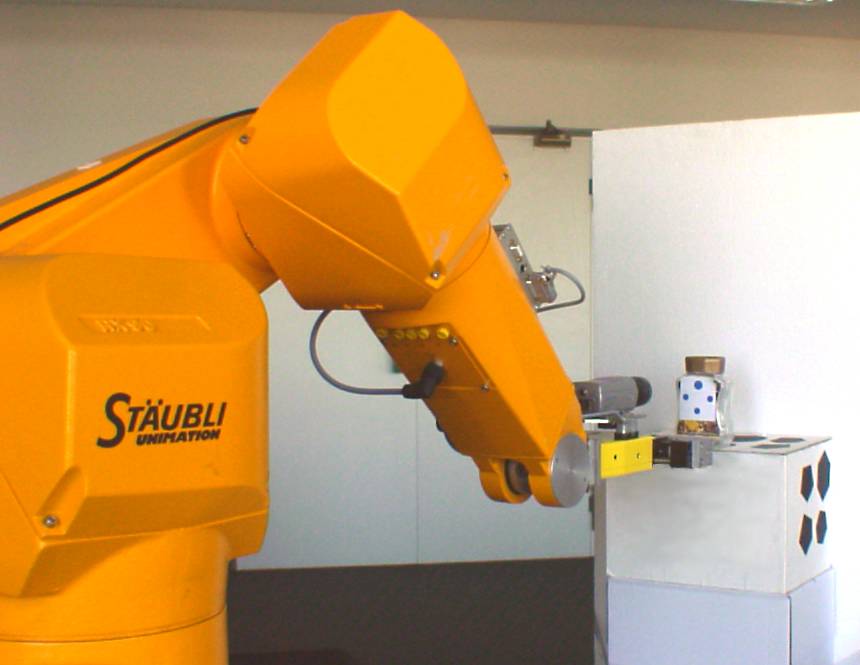
- 1999: Diplom degree in Mathematics at the University of Bremen (Germany) specialising in Dynamical Systems and Optimisation. The Diplom thesis presents an Image-based Visual Servoing controller for a 6 DOF robot.
- 2000 to February 2003: Research on automatic People Tracking in Camera Images for multi-camera visual surveillance systems. The research was done in the Computational Vision Group of the Department of Computer Science, The University of Reading (UK). The resulting PhD thesis, the source code of the tracking software and relevant articles are available below.
- 2002-2004: Research on Software Maintenance (in particular, Re-Engineering) and Software Processes with members of The University of Reading's Applied Software Engineering group.
- 2003-2009: Main research focus on Learning Methods for Autonomous Robot Systems while working as a post-doctoral assistant in the Cognitive Systems Group of the Institute of Computer Science and Applied Mathematics in the Christian-Albrechts-University of Kiel (Germany).
- 2009-: Professorship for Building Automation at the HTW University of Applied Sciences Berlin, Germany. Research on Intelligent Automation Systems, industrial and in the home. One focus: Building Automation and Security.
Below you will find information and other resources on my past and present research as well as relevant publications. This includes the source code of the
Reading People Tracker which I am maintaining.
2 Research Overview
Following is a short overview over my main research areas.
2.1 Autonomous Robot Systems and Evolutionary Learning
Since I started with robotics in 1997 I have worked on a number of algorithms to control robots, usually based on visual input, from academic research projects to industrial applications. The most prominent work is on
Image-based Visual Servoing:
- using evolutionary reinforcement learning of neural networks for the controller, and
- using a Trust-Region-based approach to achieve a very high robustness to model errors and noise.
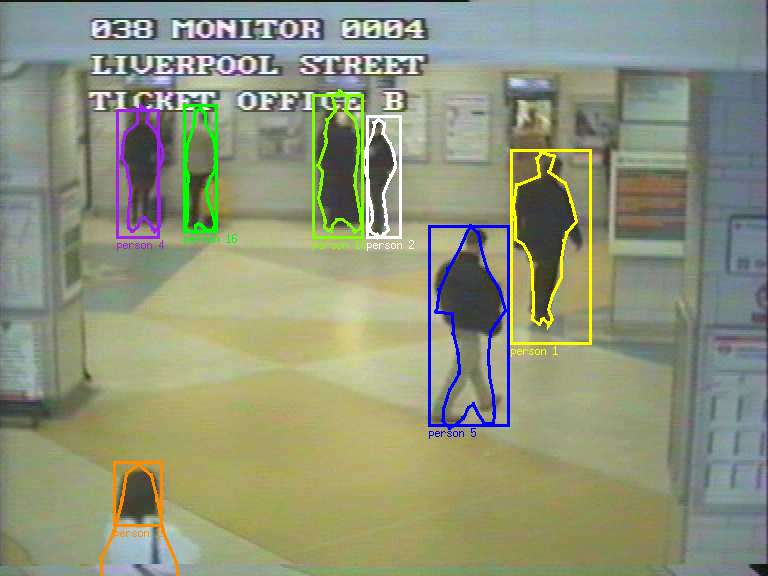
2.2 People Tracking in Camera Images (Visual Surveillance)
The task was to develop a software for robust
People Tracking in camera images for automatic visual surveillance systems.
The research was carried out within the European Framework V project
ADVISOR which was concerned with the development of an integrated visual surveillance and behaviour analysis system.
The People Tracker developed within this project is based on the Leeds People Tracker which was developed by Adam Baumberg.
2.3 Software Engineering
Between several software projects I was involved in the software quality differed enormously. Members of The University of Reading's Applied Software Engineering group and I had a closer look at the underlying reasons for these differences. The resulting research work covers the following questions:
- In what way influence software processes the quality and especially the maintainability of software? How can process diversity within the software maintenance process be classified and what special roles do these types of process diversity play?
- How can you increase the maintainability of software most effectively through re-engineering?
- What types of assertions should be used to improve code and in what way should they be used?
- How can assertions be derived automatically? How can assertions be adapted automatically when refactorings take place within the software?
3 Publications
Most of my publications are available online. Please have a look at my
Publications page for an overview.
4 Software
The following is a (short) list of software projects I am using and/or maintaining which are available online.
4.1 The Reading People Tracker
The Reading People Tracker was developed within my PhD project. It is a modular system for tracking people and other objects in video sequences. The main contribution is a powerful and scalable structure which has been achieved by a complete re-design and much refactoring of the underlying Leeds People Tracker, and the addition of new functionality, resulting in
-
high robustness of the tracker to image noise and occlusion through the use of redundant, different type trackers running in parallel, and the use of multiple tracking hypotheses (see ECCV 2002 paper or my PhD thesis for details).
-
the ability to track multiple objects in an arbitrary number of cameras, writing out tracking results in XML format.
-
scalability and much improved maintainability of the people tracker (see ICSM 2002 paper for details).
-
new documentation for maintaining the People Tracker, including a well-defined and documented software maintenance process (see JSME/SMR article for a case study on processes).
4.2 PACLib
Postal address
Nils T Siebel
Department of Engineering 1
HTW University of Applied Sciences Berlin
Wilhelminenhofstr. 75A
12459 Berlin
Germany
Electronic
E-Mail:

Please refrain from sending any type of unsolicited advertisement to the addresses given above.
Author of these pages:
Nils T Siebel.
Last modified on Sun Aug 28 2011.
This page and all files in these subdirectories are Copyright © 2004-2011 Nils T Siebel, Berlin, Germany.